Aktorik
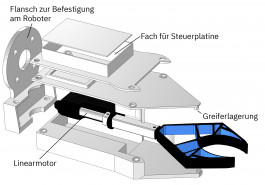
Im dargestellten Video treibt ein Linearmotor den Greifer an, der mitsamt Steuerplatine in einem 3D-gedruckten Gehäuse untergebracht ist. Hier wurde auf eine kompaktere Lösung bewusst verzichtet zugunsten einer Aktorik mit langen Fahrwegen für verschiedene Greifertypen. Alternativ ließe sich auch ein Elektrozylinder einsetzen.
Greifer
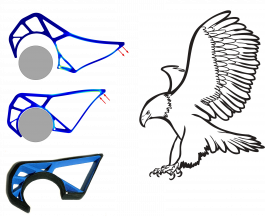
Verschiedene Greiferkonzepte bedienen unterschiedliche Anforderungen und verbessern den Design-Workflow durch neue Herausforderungen.
Organisationen


